
Become a Mapmaker by wearable technology

A new wearable device automatically creates an indoor map while its wearer walks. In the future, emergency responders could wear or carry such a device when they first enter a building, creating a digital floor plan for others to use, the device’s creators say.
“The operational scenario that was envisioned for this was a hazmat situation where people are suited up with the full suit, and they go in and explore an environment,” Maurice Fallon, a computer scientist at MIT who led research on the mapper, said in a statement. “The current approach would be to textually summarize what they had seen afterward. ‘I went into this room on the left, I saw this, I went into the next room,’ and so on. We want to try to automate that.”
The mapper comes on the heels of several automatically mapping robots, making some technically difficult adjustments for the uneven, jostling gait of humans. It’s not yet ready for hazmat responders to use because of its bulky nature.
The device employs a long list of sensors, including accelerometers, gyroscopes, a Microsoft Kinect camera, a barometer and a light detection-and-ranging device, or LIDAR. The LIDAR sends out laser beams in a 270-degree arc around the front of the device’s wearer. The device then determines the distance of walls and other features by calculating the amount of time it takes the beams to return to the sensors. Meanwhile, accelerometers and gyroscopes help the mapper sense when its wearer turns, tilts his or her torso, or ascends in an elevator. Pressure differences the barometer detects help the mapper sense when its wearer walks upstairs.
Various research labs have created real-time mapping devices, but most of those are mounted on robots. Last year, Fallon built a robot that maps as it moves. But making a version for humans is more difficult.
Robots generally roll along a smooth path, while people bounce a little as they walk, requiring the device to account for people’s gait when it’s trying to figure out what it’s seeing. Robots also use the rolling of their wheels to calculate how far they’ve gone. Fallon’s human mapper uses visual data from its camera instead.
Mapping robots trundle along a pre-planned path that minimizes overlaps, but humans exploring a dangerous situation may end up walking through the same section of a building several times, or viewing the same room from different angles. The mapper’s processing program is able to recognize when it visits the same place more than once. It knits the overlapping data together in a smooth, single blueprint.
The mapper’s other features include a button users can press to mark an important place. The device is also able to send continuous updates to a computer elsewhere, so a team in an office could keep track of emergency responders as they move about.
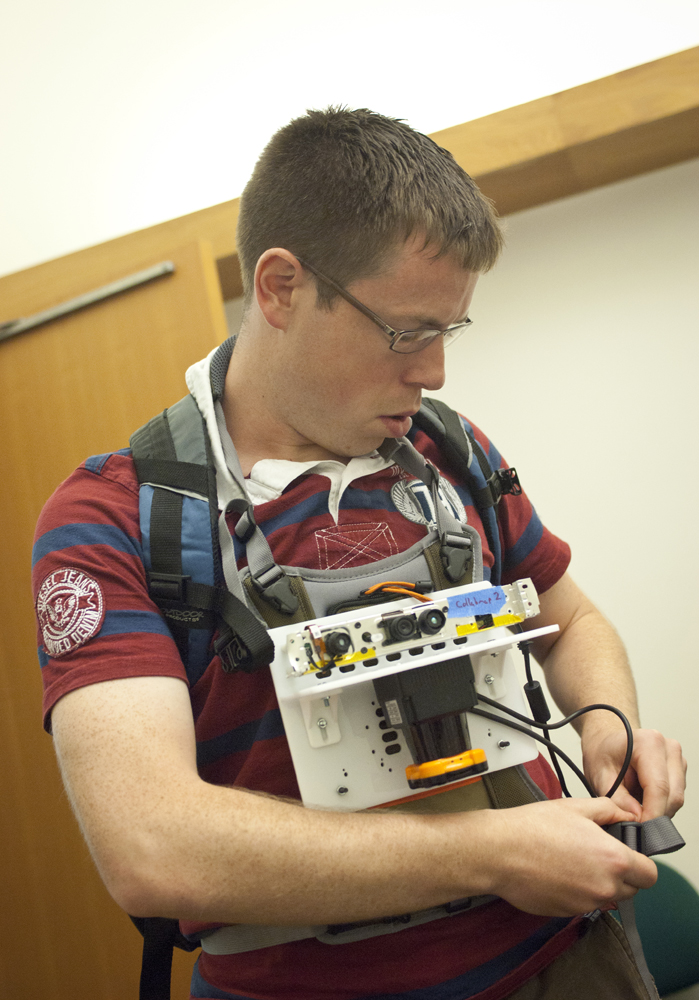
There are still improvements that have to be made before a mapper like this could be used in real emergencies. One major requirement is that it be much smaller. The current prototype has a sensor pack about the size of a tablet computer, which straps onto the front of the torso, while the user wears a backpack carrying the battery and processor.
Such additions to a hazmat suit probably aren’t feasible, Fallon and his colleagues wrote in a paper they’ll present at a robotics conference, hosted by the Institute of Electrical and Electronics Engineers and the Robotics Society of Japan, on Oct. 10. In the future, they imagine the most convenient mapper would be the size of a miner’s lamp, which emergency responders could carry in their hands or wear mounted on their shoulders.